
DS18B20 / DS18S20 Thermometer
Der 1-Wire Bus
 Die
bekannten Temperatursensoren DS18x20, lassen sich über den 1-Wirebus
von Maxim / Dallas (der nur 1 Portpin des MC belegt) auslesen. Sogar
die Leitung für die +5 Volt Stromversorgung kann man einsparen, so das
ein 2poliges Kabel (Daten und Gnd) vom Controller zum Sensor genügt. Im
Datenblatt
des DS18B20 (ab Seite 5) nennt Maxim diese Betriebsart Parasite Powered.
In dieser Betriebsart "stiehlt" der DS18x20
seinen Strom von der Datenleitung, wenn diese gerade auf High
ist. Geht der 1-Wire Bus auf Low, übernimmt dann ein zuvor
geladener Kondensator der sich im Sensor befindet, kurzzeitig
die Versorgung.
Die
bekannten Temperatursensoren DS18x20, lassen sich über den 1-Wirebus
von Maxim / Dallas (der nur 1 Portpin des MC belegt) auslesen. Sogar
die Leitung für die +5 Volt Stromversorgung kann man einsparen, so das
ein 2poliges Kabel (Daten und Gnd) vom Controller zum Sensor genügt. Im
Datenblatt
des DS18B20 (ab Seite 5) nennt Maxim diese Betriebsart Parasite Powered.
In dieser Betriebsart "stiehlt" der DS18x20
seinen Strom von der Datenleitung, wenn diese gerade auf High
ist. Geht der 1-Wire Bus auf Low, übernimmt dann ein zuvor
geladener Kondensator der sich im Sensor befindet, kurzzeitig
die Versorgung.
Durch die vielen Features des 1-Wirebus, ist allerdings auch mehr
Wissen erforderlich und die Programmierung ist wesentlich aufwendiger
als z.B bei einem TSIC 206/306, der ja auch nur eine Datenleitung
Besitzt. Man muss eben mit einem Bus kommunizieren, und nicht mit einem
einzelnen Temperatursensor, auch wenn nur ein Sensor am Bus ist ;-).
Da der 1-Wirebus ähnlich einer I2C oder TWI
funktioniert, können gleich mehrere Sensoren an die Datenleitung des
1-Wirebus angeschlossen werden. Maxim bietet nicht nur
Temperatursensoren für den 1-Wirebus an, sondern auch EEproms A/D
Wandler und Porterweiterungen, um nur einige zu nennen. Diese können
dann alle an dem einen Portpin angeschlossen werden und vom µC über den
1-Wirebus angesteuert und ausgelesen werden.
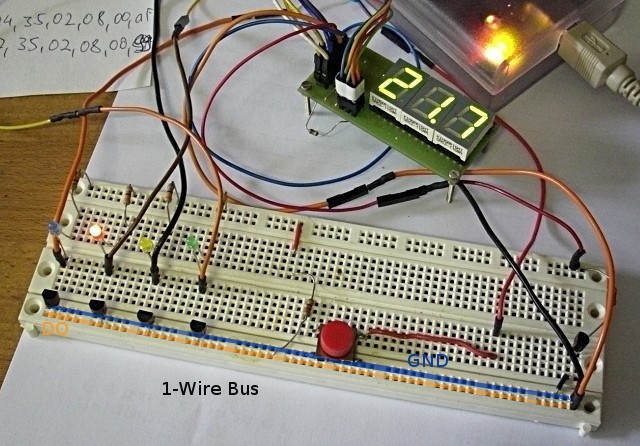
Hier mein Aufbau auf einem
Breadboard, den ich mir zum programmieren aufgebaut
habe.
Den 1-Wire Bus habe ich nachträglich eingefärbt (DQ in orange
und Gnd in blau)
Die DS18B20 und 18S20 Temperatursensoren...
... unterscheiden sich Hauptsächlich in der Auflösung die von
9 bis 12 Bit reicht. Der DS18S20 ist eigentlich für eine 9 Bit
Auflösung vorgesehen. Ein kleiner Hinweis im DS18S20
Datenblatt (Seite 3, unten) beschreibt wie man aus dem Sensor
auch 12 Bit auslesen kann. Dazu reicht ein bisschen
Bitschieben und rechnen.
Der DS18B20 wird "Werksseitig" mit 12 Bit Auflösung ausgeliefert. Die
hohe Auflösung hat allerdings ihren Preis. Die Wandlungszeit steigt
quadratisch, mit jedem Bit. Allerdings kann der Programmierer daran
noch drehen. Im Konfigurationsregister des DS18B20 kann über 2 Bits die
Auflösung von 9..12 Bit und somit die Wandlungszeit von ca. 94..750mS
eingestellt werden.
In meinem Programm nehme ich die 750mS Wandlungszeit in kauf und nutze
somit die volle Auflösung von 12 Bit beider Sensoren, wobei man den
DS18S20 im Quellcode auch mit den vorgesehenen 9 Bit konfigurieren
kann. Da der Sensor während der Wandlung mehr Strom zieht (ca.
1,5mA), müssen auch Wartezeiten (ca. 5 Sekunden) zwischen den
Wandlungen eingehalten werden, um das Messergebniss nicht durch
Eigenerwärmung zu verfälschen.
Die DS18B20/DS18S20 haben beide eine Genauigkeit (nicht zu Verwechseln
mit der Auflösung) von +/- 0,5°C im Temperaturbereich von -10°C bis
+85°C und sind schon kalibriert. Die gesamte Range der beiden Sensoren
geht von -55°C bis zu 125 °C.
Die Hardware
 Auch
hier habe ich wie schon beim TSIC-Thermometer
die kleine Portview Platine
verwendet, obwohl ich zugeben muss, das zu überlegen gewesen währe ein
LCD zu benutzen, um dann mehrere Temperaturen gleichzeitig anzeigen zu
können. Jedoch hat (für mich jedenfalls), eine 7-Segmentanzeige den
Vorteil, das man diese auch noch aus der Ferne, mit einem Blick, sehr
gut ablesen kann. In meinem Aufbau nutze ich insgesamt 4 DS18x20
Sensoren. Zwei mal den 18B20 und zwei 18S20. Die Anzahl der verwendeten
Sensoren lässt sich problemlos auf über 20 erweitern. Im Normalbetrieb
werden die Sensoren der Reihe nach ausgelesen und auf dem Display
angezeigt. Zuerst erscheint ein kleiner Infotext um welchen Sensor es
sich handelt, danach wird die Temperatur für eine einstellbare Zeit auf
dem Display angezeigt. Zusätzlich kann man jedem Sensor (optional) eine
der 5 LEDs zuordnen, die dann leuchtet, solange solange die Temperatur
von diesem angezeigt wird. Ich habe meinen 4 Sensoren 4
verschiedenfarbige LEDs zugeordnet und kann somit mit einem Blick
erkennen, welche Temperatur gerade angezeigt wird.
Auch
hier habe ich wie schon beim TSIC-Thermometer
die kleine Portview Platine
verwendet, obwohl ich zugeben muss, das zu überlegen gewesen währe ein
LCD zu benutzen, um dann mehrere Temperaturen gleichzeitig anzeigen zu
können. Jedoch hat (für mich jedenfalls), eine 7-Segmentanzeige den
Vorteil, das man diese auch noch aus der Ferne, mit einem Blick, sehr
gut ablesen kann. In meinem Aufbau nutze ich insgesamt 4 DS18x20
Sensoren. Zwei mal den 18B20 und zwei 18S20. Die Anzahl der verwendeten
Sensoren lässt sich problemlos auf über 20 erweitern. Im Normalbetrieb
werden die Sensoren der Reihe nach ausgelesen und auf dem Display
angezeigt. Zuerst erscheint ein kleiner Infotext um welchen Sensor es
sich handelt, danach wird die Temperatur für eine einstellbare Zeit auf
dem Display angezeigt. Zusätzlich kann man jedem Sensor (optional) eine
der 5 LEDs zuordnen, die dann leuchtet, solange solange die Temperatur
von diesem angezeigt wird. Ich habe meinen 4 Sensoren 4
verschiedenfarbige LEDs zugeordnet und kann somit mit einem Blick
erkennen, welche Temperatur gerade angezeigt wird.
Da eine 7-Segmentanzeige ja nicht alle Buchstaben vernünftig darstellen
kann, ist bei der Auswahl des Infotext etwas Phantasie gefragt. Ich
habe die Strings "out"," in","SCH" und "FLU" für Aussentemperatur,
Innentemperatur, Schlafzimmer und Flur zugeordnet.
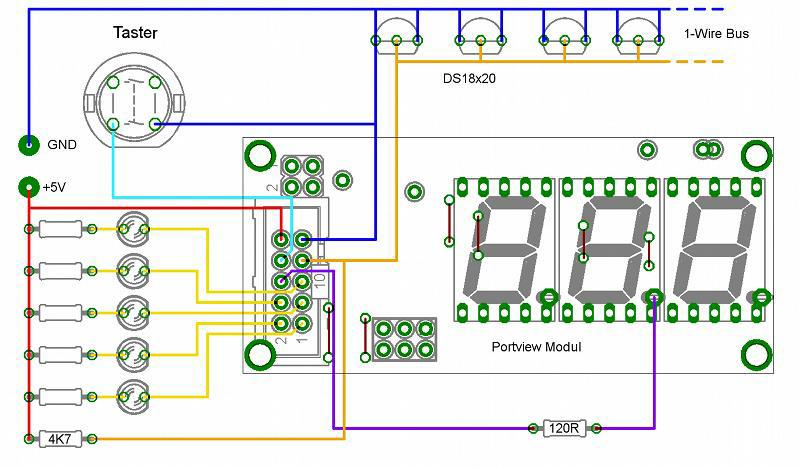
Auf der Skizze oben, sieht man wie die Platine
des Portview-Moduls
verkabelt werden muss.
Die Vorwiderstände müssen je nach verwendeter LED berechnet
werden.
Beispiel für eine rote LED mit 10mA / 2,1V lt. Datenblatt:
Rv=(U-Uled)/I Bedeutet für uns 5 V - 2,1
V = 2,9 Volt, 2,9 V / 0,01A = 290 Ohm.
Man nimmt dann in der Praxis den nächstmöglichen aus der Normreihe E12
oder E24. In diesem Fall 270 oder 300 Ohm.
Mit dem angeschlossenen Taster, kann man die
einzelnen Sensoren "durchzappen". Jeder Tastendruck schaltet einen
Sensor weiter, um am Ende wieder beim ersten Sensor zu beginnen. Ist
der gewünschte Sensor ausgewählt, wird nur noch dieser Sensor
ausgelesen, die Anzeige bleibt bei diesem Sensor
stehen. Will man wieder zum automatischen durchschalten der
Anzeige zurückkehren, drückt man den Taster 2 mal kurz hintereinander
(Doppelklick). In der Skizze sieht man noch den für den 1-Wire Bus
nötigen 4,7K Pullup-Widerstand und den Vorwiderstand für den
Dezimalpunkt der an PC5 angeschlossen wird.
Der im Datenblatt verwendete Mosfet Transistor für die parasitäre
Stromversorgung, wird in meiner Schaltung nicht verwendet, da ein
Portpin des Mega8/48 die geforderten 1,5mA die während der
Wandlungszeit erforderlich sind, problemlos liefern kann. Zur
Sicherheit, lasse ich im Programm jeden Sensor einzeln
wandeln, da sich die geforderten 1,5 mA mit jedem weiteren Sensor
addieren würden.
Die Software
Ist
in Assembler geschrieben. Dazu habe ich das AVR-Studio
4.19 verwendet. Durch die vielfältigen Möglichkeiten, kann
ich zum DS18x20-Thermometer leider keine fertige hex Datei liefern. Das
Programm ist so geschrieben, dass man im oberen Teil des Quellcodes,
durch ändern von ein paar Parametern, das Thermometer nach
seinen eigenen Wünschen konfigurieren kann.
Beim assemblieren (Build oder F7), wird dann durch bedingte Assemblierung,
das Programm abhängig von den oben gemachten Eingaben
übersetzt. Danach ist die brennfertige Hex-Datei auf der Festplatte
verfügbar und kann in den AVR geladen werden.
Zum konfigurieren des
DS-Thermometer sind keine Programmierkentnisse erforderlich, allerdings
sollte man sich etwas mit dem AVR-Studio vertraut machen.
Im Quellcode kann man im oberen Teil, folgende Einstellungen machen:
- µC. Das Programm für einen ATMega8 oder für einen ATMega48 übersetzen
- Stromversorgung der Sensoren. Normal oder Parasite
- Einzelner oder mehrere Sensoren.
- Wenn einzelner Sensor. DS18S20 oder DS18B20
- Auflösung beim DS18S20. 9 Bit oder 12 Bit
- Wartezeit zwischen den Messungen in Sekunden
- Infotext scrollen. Ein / Aus, Geschwindigkeit
So in etwa sieht der relevante Teil des Quellcodes aus, wen er ins AVR-Studio 4.19 geladen ist.
;-------------------------------------------------------------------------------------------------------
;µC. Einen der beiden
AVRs auskommentieren
;-------------------------------------------------------------------------------------------------------
#define mega48
;#define mega8
;-------------------------------------------------------------------------------------------------------
;Passendes Include
File laden
;-------------------------------------------------------------------------------------------------------
.nolist
#if defined mega48
#include "m48def.inc"
#else
#include "m8def.inc"
#endif
.list
;-------------------------------------------------------------------------------------------------------
;Stromversorgung des
Sensors. Wenn +5V an Pin3(Vcc) des DS18x20 soll, auskommentieren
;-------------------------------------------------------------------------------------------------------
#define parasite
;-------------------------------------------------------------------------------------------------------
;Nur einen DS18x20
Anonym (ohne Romcode) auslesen. ACHTUNG, es darf nur ein DS am Bus
angeschlossen sein
;-------------------------------------------------------------------------------------------------------
;#define
Anonym ;Sollen also mehrere
DS18x20 mit bekanntem Romcode ausgelesen werden, auskommentieren
;#define
DS18S20 ;Wird nur 1 Sensor Anonym
ausgelesen, den passenden Sensor
definieren
;#define
DS18B20 ;Sollen also mehrere Sensoren
ausgelesen werden, beide Sensoren auskommentieren.
;-------------------------------------------------------------------------------------------------------
;Beim DS18S20 die
höhere Auflösung von 12 Bit nutzen
;-------------------------------------------------------------------------------------------------------
#define DS18S20_Zehntel ;Bei
Auskommentierung werden bein DS18S20 nur 9 Bit genutzt
;-------------------------------------------------------------------------------------------------------
;Wartezeit zwischen
den Messungen
;-------------------------------------------------------------------------------------------------------
.set sekunden =5 ;Sollte im Single &
Anonym Modus min.5 Sekunden sein (Eigenerwärmung der Sensoren)
;-------------------------------------------------------------------------------------------------------
;Infotext rollen. Auskommentieren, wenn nicht gewünscht
;-------------------------------------------------------------------------------------------------------
#define Scroll_In
#define Scroll_Out
.set
Speed=160
;Verzögerung in mS. Max. 434
Die Auskommentierung einer Zeile wird im AVR-Studio mit einem Semikolon gemacht. Alles was dann nach dem Semikolon folgt, wird in grüner Schrift angezeigt und nicht übersetzt. Diese Funktion ist also nur für den Programmierer gedacht, damit dieser Notizen ins Programm einfügen kann und hat keine Auswirkung auf das später übersetzte Programm. Möchte man z.B. das Programm für einen ATMega 8 assemblieren, ändert man den Quelltext wie folgt:
;-------------------------------------------------------------------------------------------------------
;µC. Einen der beiden
AVRs auskommentieren
;-------------------------------------------------------------------------------------------------------
;#define mega48
#define mega8
Stromversorgung des DS18x20
Möchte man aus irgendwelchen Gründen keine Parasitäre Spannungsversorgung, kann man durch auskommentieren von ;#define Parasite die normale Stromversorung aktivieren.
Gründe dafür könnten sein:
- Man möchte mehr als 100°C messen.
- Man fürchtet einen Absturz des µC, währen der "Strong Pullup" aktiv ist und der DS18x20 auf low zieht
1.) Im Datenblatt der Sensoren wird erwähnt, das die parasitäre Versorgung nicht für Messungen über 100 °C geeignet ist.
2.) Während der Messung, muss bei parasitärer Stromversorgung
die Datenleitung zum Sensor auf Ausgang programmiert werden, um die
nötigen 1,5 mA zu liefern, die der interne DS18x20- A/D-Wandler zum
messen braucht. Stürzt der µC während dieser Zeit ab (z.B. EMV) und der
DS18x20 will (aus welchen unwahrscheinlichen Gründen auch immer) einen
low Pegel auf die Datenleitung legen, haben wir 2 Ausgänge mit
unterschiedlichen Pegeln verbunden, was natürlich nicht lange gut geht  .
.
Für diesen unwahrscheinlichen Fall habe ich den Watchdog des AVRs
aktiviert, der alle 500 mS zurückgesetzt werden muss. Geschieht das
nicht(z.B bei einem Absturz), löst dieser einen Reset aus der die Ports
wieder initialisiert und somit die Datenleitung wieder auf Eingang
konfiguriert. Der Kurzschluss kann also im schlechtesten Fall 500mS
dauern. Ich selbst, habe die parasitäre Stromversorgung aktiviert.
Nur einen Sensor anschliessen
Bei nur einem Sensor am 1-Wirebus, sollte man ";#define Anonym" in "#define Anonym" ändern. In diesem Fall, ist es zusätzlich nötig, den verwendeten Sensor zu definieren. Werden mehrere Sensoren angeschlossen, bleiben alle 3 betreffende Zeilen Auskommentiert. Bei nur einem Sensor, ist der Taster und die LED(s) natürlich sinnlos, weshalb diese Teile des Codes auch nicht übersetzt werden. Es wird dann fortlaufend die Temperatur dieses einen Sensors auf dem Display angezeigt.
;------------------------------------------------------------------------------------------------------------
;Nur einen DS18x20
Anonym (ohne Romcode) auslesen. ACHTUNG, es darf nur ein DS am Bus
angeschlossen sein
;------------------------------------------------------------------------------------------------------------
#define
Anonym ;Sollen
also mehrere DS18x20 mit bekanntem Romcode ausgelesen werden,
auskommentieren
;#define
DS18S20 ;Wird nur 1 Sensor Anonym
ausgelesen, den passenden Sensor
definieren
#define
DS18B20 ;Sollen also mehrere
Sensoren ausgelesen werden, beide Sensoren auskommentieren.
Beispiel für einen einzelnen DS18B20 am 1-Wire Bus
Auflösung beim DS18S20
Der DS18S20 ist normalerweise für eine Auflösung von 9 Bit (nur 0,5 hinterm Komma) vorgesehen. Da dieser ursprünglich als Nachfolger für den älteren DS1820 entwickelt wurde, wird aus aus Kompatibilitätsgründen in den Temperaturregistern, nach der Messung ein nur 9 Bit Temperaturwert bereitgestellt, obwohl der DS18S20 intern 12 Bit auflöst. Dallas stellt im Datenblatt eine Formel zur Verfügung um den DS18S20 auf 12 Bit zu erweitern. Man kann im Programm durch " #define DS18S20_Zehntel " die 12 Bitauswertung (0..9 hinterm Komma) aktivieren.
Wartezeit zwischen den Messungen
Wie schon erwähnt, zieht der DS18x20 während der Wandlung bis zu 1,5 mA. Würde man den Sensor permanent wandeln lassen, hätte dies eine Eigenerwärmung zur Folge. Bei meinen Versuchen stellte ich bei fortlaufenden Messungen (polling) eine Eigenerwärmung von bis zu 0,5°C fest. Dieser Fehler wird kleiner, je grösser die Intervalle zwischen den Messungen werden. Ab 5 Sekunden, stellte ich keine Temperaturerhöhungen mehr fest. Im Programm kann bei " .set sekunden =5 " die Zeit in Sekunden Festgelegt werden.
Infotext rollen
Spielerei  . Hier kann man
entscheiden, ob Text einfach normal auf dem Display erscheint, oder von
rechts hereingeschoben werden soll.. Mann kann das herein und
hinausschieben getrennt einstellen. Die Geschwindigkeit in
Millisekunden können in der Speedvariable geändert werden. Sinnvolle
Werte sind ~120...250
. Hier kann man
entscheiden, ob Text einfach normal auf dem Display erscheint, oder von
rechts hereingeschoben werden soll.. Mann kann das herein und
hinausschieben getrennt einstellen. Die Geschwindigkeit in
Millisekunden können in der Speedvariable geändert werden. Sinnvolle
Werte sind ~120...250
Mehrere Sensoren am 1-Wire Bus
Hierbei gibt es 2 verschiedene Möglichkeiten.
Man kann mit dem 1-Wirebefehl "Search_Rom"
und einem speziellen Suchalgorithmus jeden unbekannten Sensor am Bus
ansprechen. Allerdings weiss man dann nicht um welchen Sensor es sich
handelt. Da ich bis jetzt das erste mal auf dem 1-Wire Bus unterwegs
bin, nutze ich (vorerst  ) die 2. und auch
einfachere Möglichkeit.
) die 2. und auch
einfachere Möglichkeit.
Damit die Software später die einzelnen 1-Wire Komponenten
auseinanderhalten kann, hat jeder Baustein eine individuelle Signatur.
Im Datenblatt von Dallas/Maxim ist die Rede von einem "64-Bit Lasered ROM Code".
Dieser 8 Byte lange Code ist bei jedem Sensor unterschiedlich. Ähnlich
wie beim I2C-Bus, kann man mit dieser Bytefolge jeden
Baustein einzeln adressieren.
Bei nur einem DS18x20 am Bus, ist das kein Problem. Maxim stellt für
diesen Fall sogar extra den 1-Wire Befehl "Skip-Rom" zur Verfügung.
Allerdings darf bei Verwendung von "Skip-Rom" nur ein DS18B20 / DS
18S20 am Bus vorhanden sein, da ja sonst alle Sensoren beim auslesen
der Temperatur gleichzeitig Antworten würden, was einen Crash auf dem
1-Wire Bus zur Folge hätte.
Will man also einen bestimmten DS18x20 ansprechen, sendet man also
zunächst den 8-Byte langen Rom Code. Leider ist die Signatur
nicht auf den DS18x20 aufgedruckt oder sonstwie ersichtlich. Der
Romcode muss ausgelesen werden. Zu diesem Zweck habe ich in
die Software eine kleine Routine eingebaut die diese 8 Bytes ausliest
und als Hexzahlen auf dem Display anzeigt.
Um den Romcode eines DS18B20 /DS18S20 auszulesen geht man folgendermaßen vor:
- Zunächst spielt man die Firmware auf. Am besten eine Version in der #define Anonym definiert ist.
- -WICHTIG - Den noch Anonymen Sensor schliesst man als "einzigen Sensor" an den 1-Wire Bus an.
- Man überbrückt mit einem Jumper Pin 1 und 2 von JP1.
- Nach dem einschalten werden dann alle 8 Bytes nacheinander auf dem Display angezeigt.
- - Test - Nach dem abziehen des Jumpers wird die Temperatur des Sensors ausgelesen, so sieht man auch gleich, ob der DS18x20 plausible Werte liefert.
Wird der Jumper aufgesteckt, erscheint auf der
Anzeige mit "LC0", was soviel wie "Lasered Code 0" bedeutet. Kurz
darauf wird für etwa 4..5 Sekunden eine Hexzahl angezeigt (Byte 0) die
man sich notiert. Danach wird das Display kurz dunkel und es erscheint
"LC1" und kurz darauf Byte 1. Das geht dann so weiter bis zu
LC7 um dann wieder mit LC0 zu beginnen. Sind alle 8 Bytes notiert,
lässt man die Sequenz zur Sicherheit nochmals durchlaufen um die
notierten Werte zu verifizieren.
Diesen Vorgang wiederholt man solange, bis der "64-Bit Lasered ROM
Code" aller DS18x20 Sensoren, die an das Thermometer angeschlossen
werden sollen, bekannt sind. Jetzt kann man die Hexwerte in den
Quellcode einfügen. Natürlich müssen meine Daten entfernt werden.
;*****************************************************************************************
;
Tabelle der DS18x20 Roms
;*****************************************************************************************
#ifndef
Anonym
;Bei mehreren
Sensoren Assemblieren
.org
flashend-$ff
;Ganz hinten rein
RomCode:
;------------------------------------------------------------------------------------------------------
;Sensor 1
;------------------------------------------------------------------------------------------------------
.db
$28,$75,$45,$c7,$03,$00,$00,$0d
;Ein DS18B20 mit
Family Code $28
.db
_oo,_uu,_t,led0
;Infotext "out".LED
an PC0 Ein.
;------------------------------------------------------------------------------------------------------
;Sensor 2
;------------------------------------------------------------------------------------------------------
.db
$28,$eb,$09,$c7,$03,$00,$00,$67
;Auch ein 18B20
.db
_,_ii,_n,led1
;Infotext " in"
;
-----------------------------------------------------------------------------------------------------
;Sensor 3
;------------------------------------------------------------------------------------------------------
.db
$10,$5b,$74,$35,$02,$08,$00,$af
;Ein DS18S20
.db
_S,_C,_H,led2
;Infotext "SCH" für
z.B. Schlafzimmer
;------------------------------------------------------------------------------------------------------
;Sensor 4
;------------------------------------------------------------------------------------------------------
.db $10,$c5,$97,$35,$02,$08,$00,$99
.db
_F,_L,_U,led3
;Infotext "FLU" für
Flur
;------------------------------------------------------------------------------------------------------
;Anzahl der
Sensoren.(Hier nix machen, wird berechnet)
;------------------------------------------------------------------------------------------------------
.set Anzahl= (PC-RomCode)/6 ;Im Flash wird mit Wortlänge
gerechnet, deshalb bei 12 Byte /6
#endif
Jeder Sensor bekommt in der Tabelle einen Datenblock von 12
Bytes zugeordnet. Zuerst werden die 8 Bytes Romcode, den man zuvor
ausgelesen hat, eingetragen. Danach folgt ein kleiner Text von 3
Zeichen, der vor dem anzeigen der Temperatur angezeigt wird. In das
letzte Byte, wird die LED eingetragen, die leuchten soll, solange der
entsprechende Sensor aktiv ist oder eine Null. Es ist wichtig, die
länge des Datenblocks von 12 Byte einzuhalten, sonst wird im Programm
der Zeiger zum nächsten Datenblock nicht richtig berechnet.
Da nur 5 Leitungen für Leds zur Verfügung stehen, kann man das Led-Byte
auch verodern. Bei Eingabe von z.B. "led1|led4" würden beide
Leds leuchten. So könnte man auch eine Duo oder RGB-Led (gemeinsame
Anode) verwenden, die dann mit 3 Led-Pins bis zu 7 verschiedene Farben
anzeigen könnte.
Da der Romcode im ersten Byte den Familycode enthält, braucht der DS18x20 nicht mehr extra definiert werden. Das ist nur nötig, wenn wie oben beschrieben ein einzelner Sensor ohne Romcode betrieben wird. Das erste Byte, sollte immer mit $10 bei einem DS18S20 oder $28 bei einem DS18B20 beginnen.
Bei den Buchstaben ist man mit einer Siebensegmentanzeige etwas eingeschränkt, da sich auf dieser nicht alle Chars vernünftig darstellen lässt. Hier die Tabelle mit den möglichen Zeichen.
;-------------------------------------------
;Einzelne Segmente
;-------------------------------------------
.equ a_ = 0b0111111
.equ b_ = 0b1011111
.equ c_ = 0b1101111
.equ d_ = 0b1110111
.equ e_ = 0b1111011
.equ f_ = 0b1111101
.equ g_ = 0b1111110
;-------------------------------------------
;Equates der Chars
.equ _ =
$FF // Space
.equ _0 = $81 // 0
.equ _1 = $CF // 1
.equ _2 = $92 // 2
.equ _3 = $86 // 3
.equ _4 = $CC // 4
.equ _5 = $A4 // 5
.equ _6 = $A0 // 6
.equ _7 = $8F // 7
.equ _8 = $80 // 8
.equ _9 = $84 // 9
.equ _A = $88 // A
.equ _aa = $e2 // a
.equ _B = $E0 // B
.equ _cc = $F2 // c
.equ _C = $B1 // C
.equ _D = $C2 // D
.equ _E = $B0 // E
.equ _F = $B8 // F
.equ _gg = $84 // g
.equ _G = $A1 // G
.equ _hh = $E8 // h
.equ _H = $C8 // H
.equ _ii = $EF // i
.equ _I = $CF // I
.equ _J = $C3 // J
.equ _L = $F1 // L
.equ _n = $EA // n
.equ _oo = $E2 // o
.equ _O = $81 // O
.equ _P = $98 // P
.equ _q = $8C // q
.equ _r = $FA // r
.equ _S = $A4 // S
.equ _t = $F0 // t
.equ _uu = $E3 // u
.equ _U = $C1 // U
.equ _Y = $D8 // Y
Wie man sieht, fehlen die breiteren Buchstaben wie z.B. W und M sowie Buchstaben die einen Schrägstrich beinhalten z.B. Z und K. Bei anderen Buchstaben geht dafür Gross- und Kleinschrift wie z.B. beim O. In Diesem fall wird für ein kleines o der Buchstabe doppelt geschrieben, also _oo.
Download
Download ASM-Quellcode für AVR-Studio 4.19
Da ich meine Programme in Assembler schreibe, benutze ich immer noch die ältere AVR-Studio 4.xx Version. Ich weiss zwar, das es mittlerweile schon AVR-Studio 6.x zu haben ist, sehe aber im Moment keine Vorteile für ASM-Programmierer (ist nur meine persönliche Meinung). Wer Wert auf schönere Piktogramme und Design legt, kann auch die neuste Version herunterladen und den Quellcode für diese Version konvertieren. Leider kann ich dann nicht weiterhelfen, wenn es dann nicht so funktioniert wie gewünscht.
Da
mich immer wieder Emails erreichen, wie den ein Assembler Programm in
ein AVR geladen wird habe ich hier eine kleine Anleitung angehängt auf
die ich dann in Zukunft verlinken kann .
Wer sich im AVR-Studio schon etwas auskennt, dem genügen wohl schon die
Informationen von oben um das DS18x20 Thermometer aufzubauen und
braucht nicht mehr weiterzulesen.
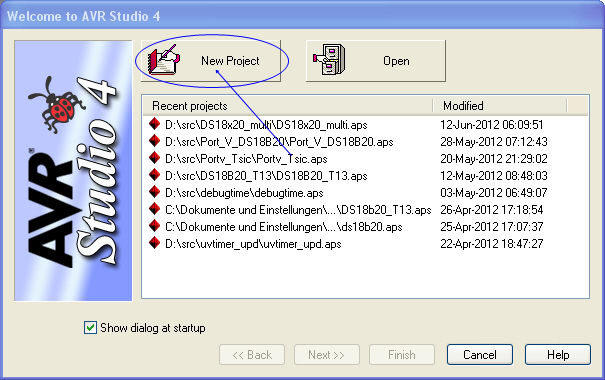
Neues Projekt erstellen
Hat man das AVR-Studio 4.19 installiert und gestartet, kann man auch gleich ein neues Projekt erstellen.
Hier Atmel AVR Assembler wählen und einen Projektnamen eingeben.
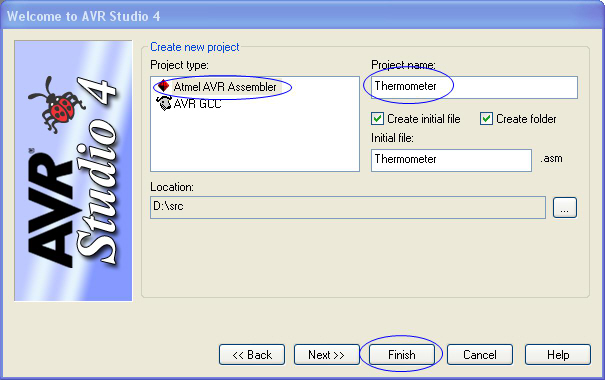
Ein klick auf Finish, öffnet den Editor. Ausserdem legt AVR-Sudio einen Projektordner an und erzeugt in diesem ein Projektfile welches später durch anklicken das Projekt öffnet.
AVR-Studio ist nun Bereit. Nun kann der Quelltext in das Mittlere Fenster kopiert werden. Dazu den Quellcode mit dem Windows Editor öffnen und "ALLES markieren".
Kopieren.
Und in den AVR-Studio Editor kopieren
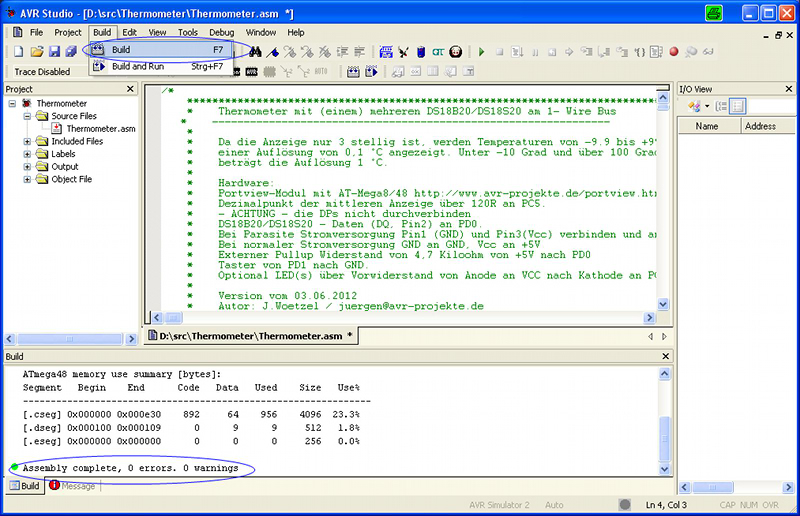
Um das Programm zu assemblieren (übersetzen) und somit die
brennbare Hex-Datei zu erhalten im Menü Build wählen, oder einfach F7
drücken. Hat alles geklappt meldet AVR-Studio im Status Fenster unten,
Assembly complete, 0 Errors, 0 Warnings.
Nun befindet sich die brennbare Hex-Datei sowie alle
anderen Dateien im Projektordner.
Den AVR programmieren
Den Programmer (in meinem Beispiel der AVR-Dragon) mit der
ISP-Pfostenleiste der Hardware und mit dem PC verbinden. Im
Tools-Menü Programm
AVR -> Connect
wählen um seinen Programmer aus einer Liste auszuwählen. Hat
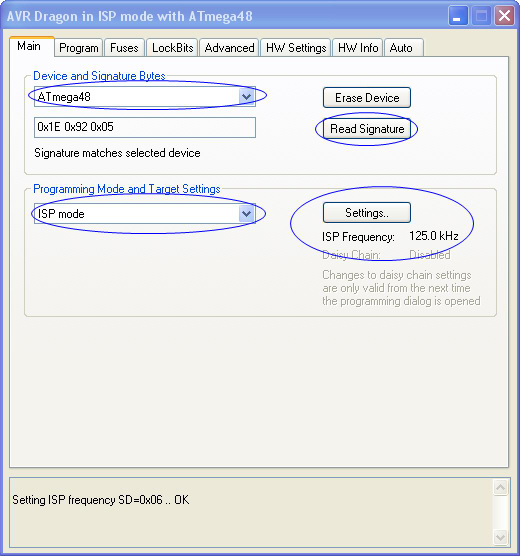
bis dahin alles geklappt, erscheint ein Fenster wie unten.
Zunächst sollte man die Device (den AVR, der am Programmer hängt)
auswählen. Danach stellt man den ISP mode ein (ist default) und bei
Settings, die ISP Frequenz. Diese sollte maximal 1/4 der µC Frequenz
betragen. Langsamer geht immer . Achtung, auch wenn ein 8 MHz
Quarz auf der Platine ist, läuft ein neuer AVR (meistens) auf 1 MHz,
sodass die maximale ISP-Frequenz 250 KHz betragen darf. Ich gehe
meistens aus Sicherheitsgründen noch eine Stufe herunter und stelle 125
KHz ein. Ist alles soweit eingestellt verrät uns ein Klick auf Read Signature ob
unser AVR mit uns spricht. Der angezeigte Hex-Wert ist die Signatur
eines AT mega48. Wichtig ist der Satz darunter, der besagt das die
Signatur zu unserem eingestellten Mega48 passt.
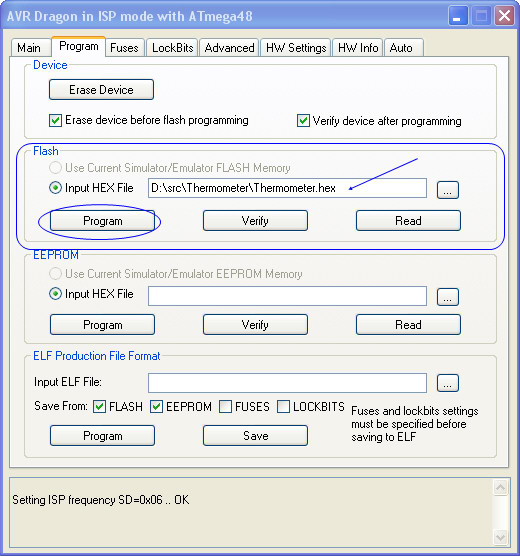
Ein klick auf den Program Reiter, öffnet den Programmierdialog. Hier unter Flash den Pfad zur Hex-Datei herstellen. Ein klick auf Program, lädt die Hex-Datei in unseren AVR.
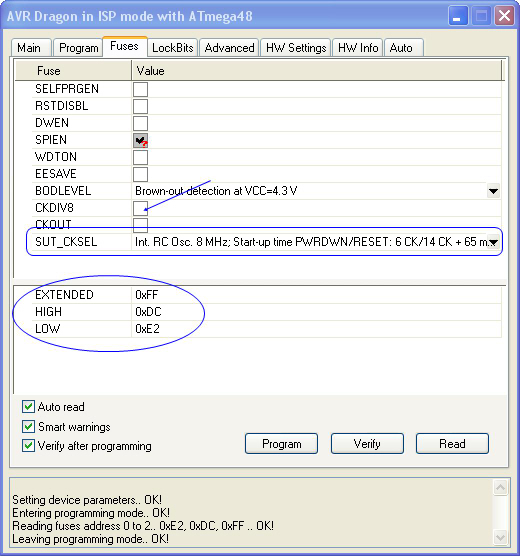
Bei den Fusebits können auch (falls bekannt), die Hex-Werte
direkt eingegeben werden.
Bei SUT_CKSEL
wählt man die Taktquelle aus. In diesem Fall den internen RC Oszilator
mit 8 MHz. Bei der Start-up Time wähle ich aus Sicherheitsgründen immer
den höchsten Wert, 65mS.
Die CKDIV8
Fuse die den Systemtakt durch 8 teilt, muss abgeschaltet werden. Diese
ist bei einem neuen Mega48 eingeschaltet.
Die BODLEVEL
Einstellung bewirkt, das wenn die Betriebsspannung unter den
eingestellten Wert fällt, einen Reset. Wenn wir die Schaltung mit einem
Steckernetzteil mit nachgeschaltetem 7805 versorgen, kann die Brown-out
detection auch abgeschaltet werden.
Wichtig! Nicht mit den Fusebits herumspielen, wenn man nicht weiss was man macht.
Immer das Datenblatt des entsprechenden µC aufmerksam lesen.
Beispiel:
Man stellt an SUT_CKSEL
den Takt auf einen externen Quarz (oder Quarzoszillator), obwohl keiner
angeschlossen ist.
Der AVR lässt sich jetzt nicht mehr programmieren, weil kein
Takt an den entsprechenden XTAL Pins erzeugt wird.
Abhilfe: Einen Quarz (oder Quarzoszillator) anschliessen und die Fuses
auf RC Oszilator programmieren.
Beispiel 2:
Man schaltet RSTDISBL
ein.
Nun haben wir ein Portpin dazubekommen dafür aber keinen Resetpin mehr . Da die Resetleitung auch für ISP
benötigt wird, können wir den AVR nicht mehr über ISP programmieren.
Wir haben uns also ausgesperrt. Hier hilft nur noch ein
Programmiergerät das auch HV-Programmierung unterstützt. Z.B. der
AVR-Dragon.


{kind=link}